
You Mengzhe
2021年11月26日星期五
TF执行计划可视化
之前我们通过一篇文章入门了使用Terrafrom以声明式配置文件(可版本化的代码)来创建和管理基础设施资源。
在使用命令terraform apply之前,我们通常使用terraform plan来查看执行计划,输出的执行计划以类似“git diff”的文本方式描述。这里我们将介绍如何以图形可是化的方式来了解执行计划。
Terrafrom Graph
首先Terraform CLI工具自带了一个子命令 - graph,graph命令用于生产配置和执行计划的图形表示,其输出是DOT格式,可以通过Graphviz转化为图片,例如在Linux终端下
❯ terraform graph | dot -Tsvg > graph.svg

对于简单的项目(管理的资源对象比较的情况),我们可以通过这个图形了解资源对象的关系。但是如果一个项目管理了大量的资源对象,使用graph生成的图形会显得错中复杂,而且图形文件也比较庞大。
那接下我们将介绍一款开源的可视化工具。
Rover
Rover是一款开源的,可交互的Terraform配置和执行计划可视化工具,其通过Web服务的方式,是我们可以通过浏览器查看生成的图形,并进行一些交互操作。
使用Rover非常容易,可以从其Github项目的Release下载为各平台编译好的二进制文件(命令)来运行,也可以通过Docker容器的方式运行。
如果使用下载的二进制文件,将下载好的二进制文件(例如 rover_v0.2.2)放到PATH路径下,例如 /usr/local/bin/rover,接下來在Terraform项目的文件夹下执行
❯ rover
2021/11/26 16:59:34 Starting Rover...
2021/11/26 16:59:34 Initializing Terraform...
2021/11/26 16:59:35 Generating plan...
2021/11/26 16:59:37 Parsing configuration...
2021/11/26 16:59:37 Generating resource overview...
2021/11/26 16:59:37 Generating resource map...
2021/11/26 16:59:37 Generating resource graph...
2021/11/26 16:59:37 Done generating assets.
2021/11/26 16:59:37 Rover is running on 0.0.0.0:9000
运行rover命令,其将会执行以下操作
- 解析目录下的配置文件,并通过Terraform plan生成执行计划文件
- 解析计划和配置文件,生成3种对象: 资源概览(rso),资源映射图(map),资源图(graph)
- 使用上面的3中对象,将其转换为可交互的配置和状态视图,以Web服务器运行在本地的 9000 端口
我们可以通过浏览器访问 http://localhost:9000/ 来查看可视化的结果。
整个页面包含4个部分
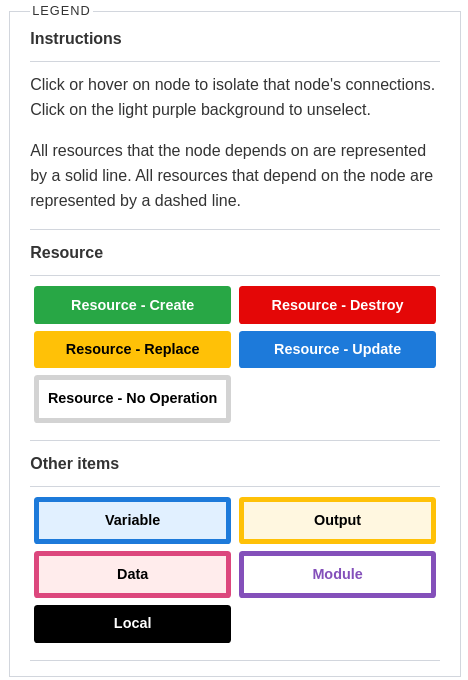
LEGEND - 该部分是对图例的一些说明
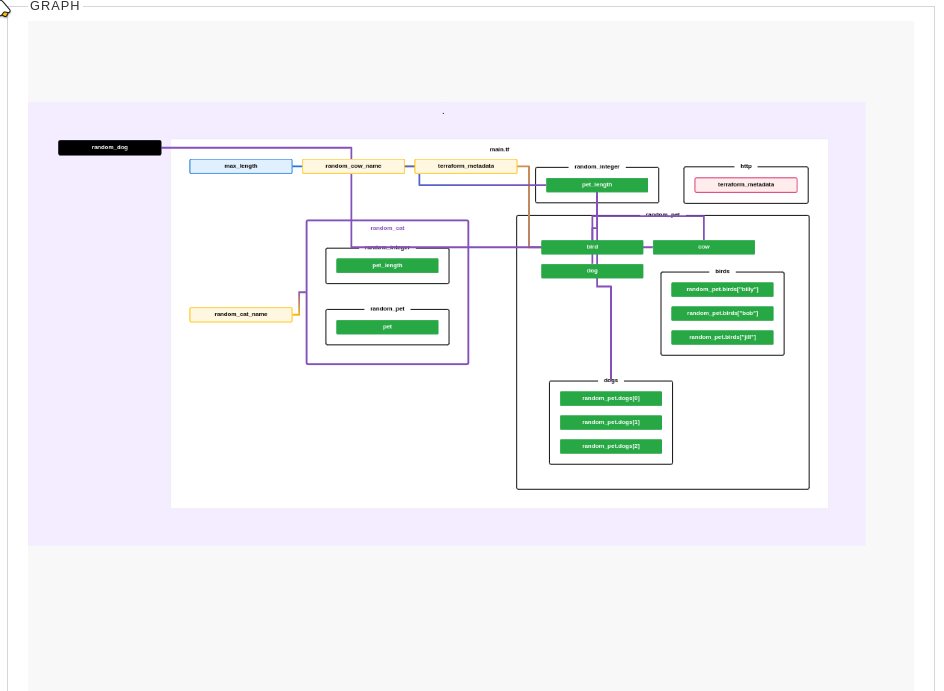
GRAPH - 这部分是整个资源关系和状态的视图,可使用鼠标进行缩放,拖拽,以及选择某一个资源
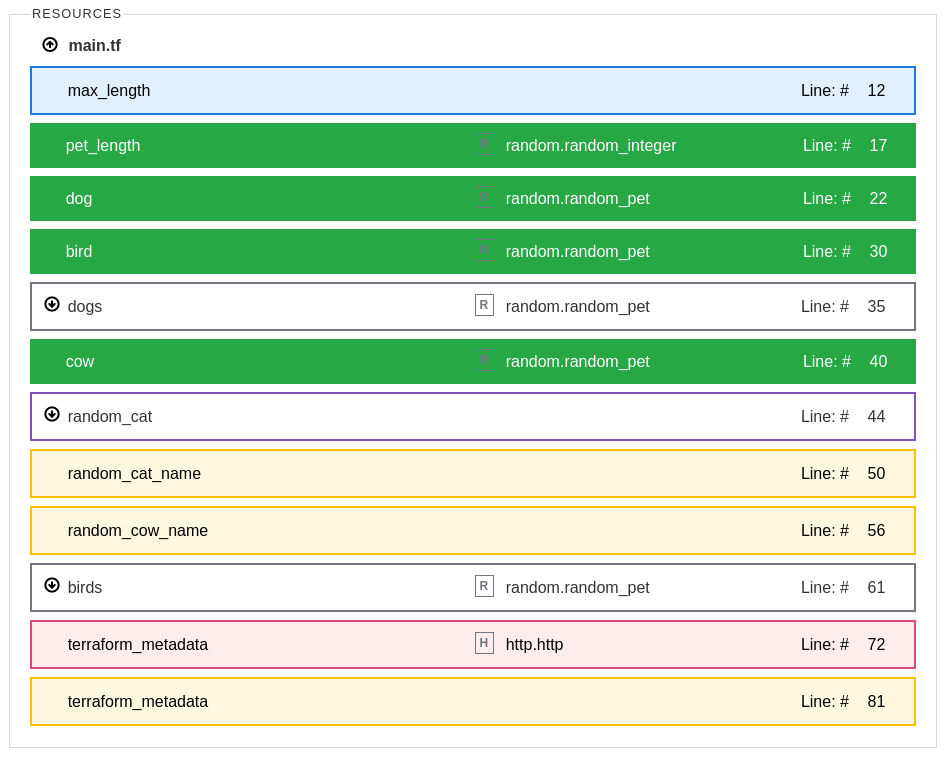
RESOURCES - 资源文件的映射列表,现实了资源在配置文件中的定义位置,同时也可以使用鼠标进行选择
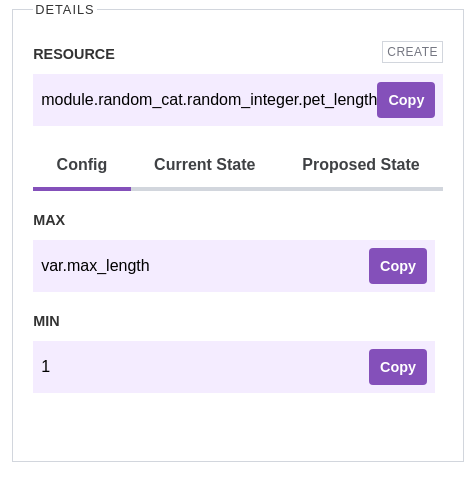
DETAILS - 详细信息视图,当使用鼠标选择了 GRAPH 或者 RESOURCES 视图中的资源对象时,这里将现实其详细的信息
通过与 terraform graph 生成的图形对比,Rover展示了更加丰富和美观的视图,让我们能以可视化的方式充分理解项目所管理的资源。
注意的问题
- Rover还不支持使用了“remote” - Backend的项目,因为还没办法将执行计划保存到本地
介绍视频
HashiCrop的工程师Tu Nguyen,也就是Rover的开发者,在 Youtube 上发布了他介绍Rover的视频